At last the time has come to say farewell to SBot 2 v1. I have decided to rebuild it using a new chassis instead of trying to rig something up to get it to work. I wanted this robot to be durable and usable all day with autonomous operation. After so many issues, it’s time to go back to the drawing board.
SBot2 brought me many learning experiences and the like Sbot 1, it has enabled me to rebuild it with a much better design. Building SBot 2 brought many good and bad times. A lot of money spent with very little much to show for it, except for a robot that can go forward and backward and “try” to stop before it hits an object.
So for a farewell, here was a list of it’s problems:
- Wasn’t fast enough to stop when the sensor picked up a object in front.
- Motors were not able to draw enough current to turn smoothly or even at all especially on carpet.
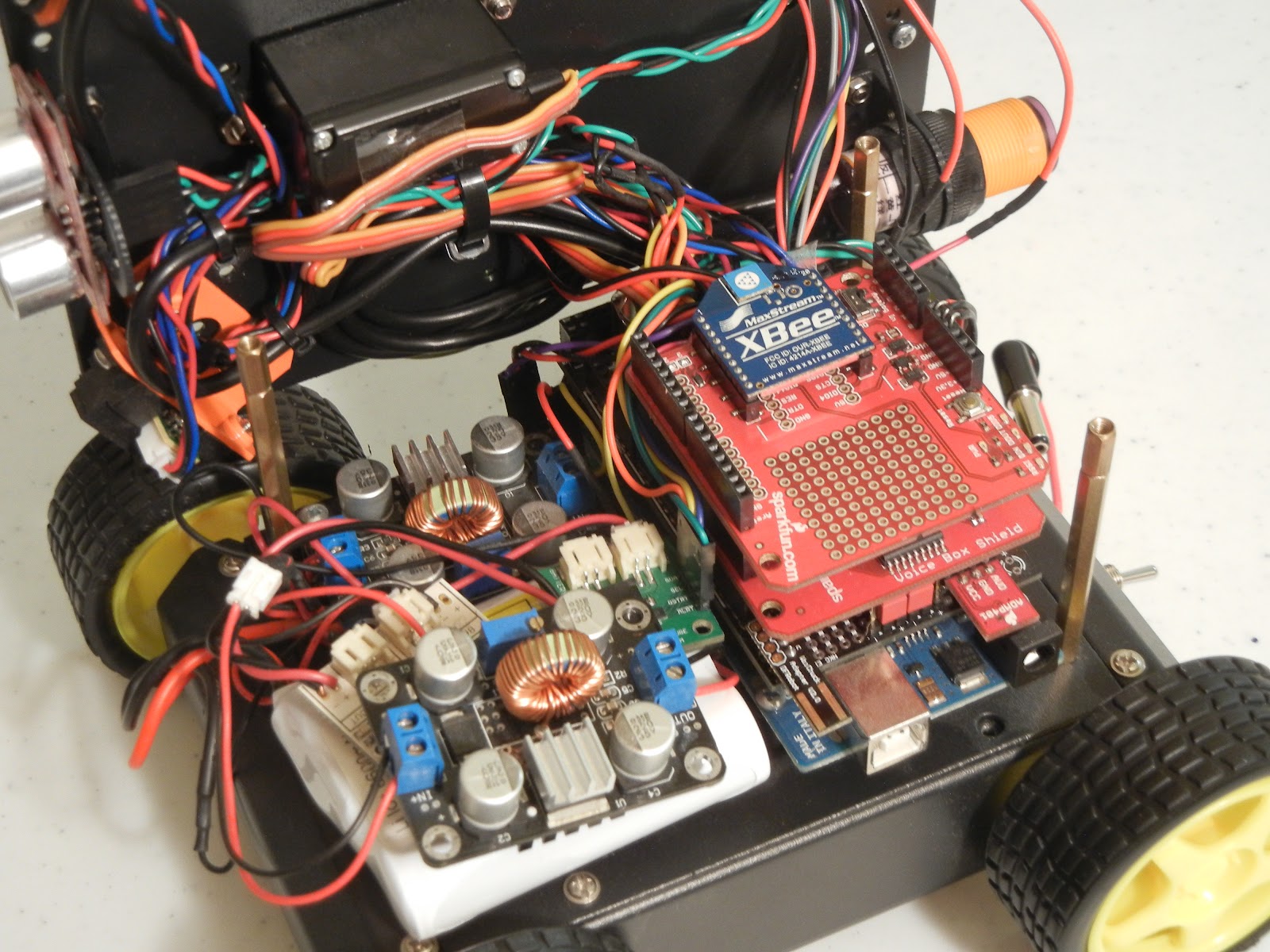
- Power system was inefficient with the use of step-ups.
- Poor build quality of wheels and therefore would not drive straight or wheels would fall off.
- No wheel encoders.
- Very difficult to work on and get to all the parts for repair or testing.
- Bad connector for Wii Nunchuck.
- Microphone didn’t register much.
- Current sensor didn’t register much.
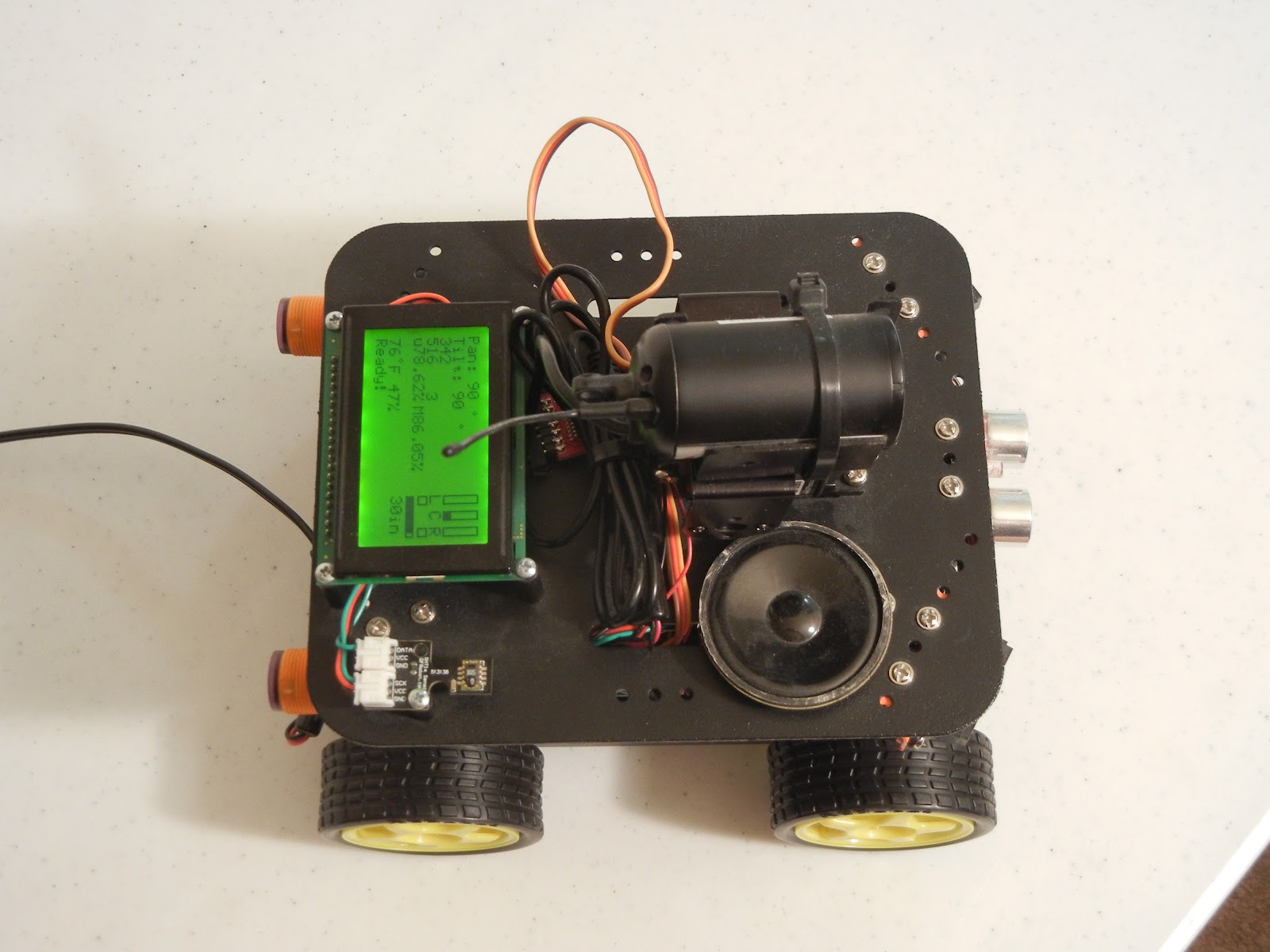
- LCD dims when motors start.
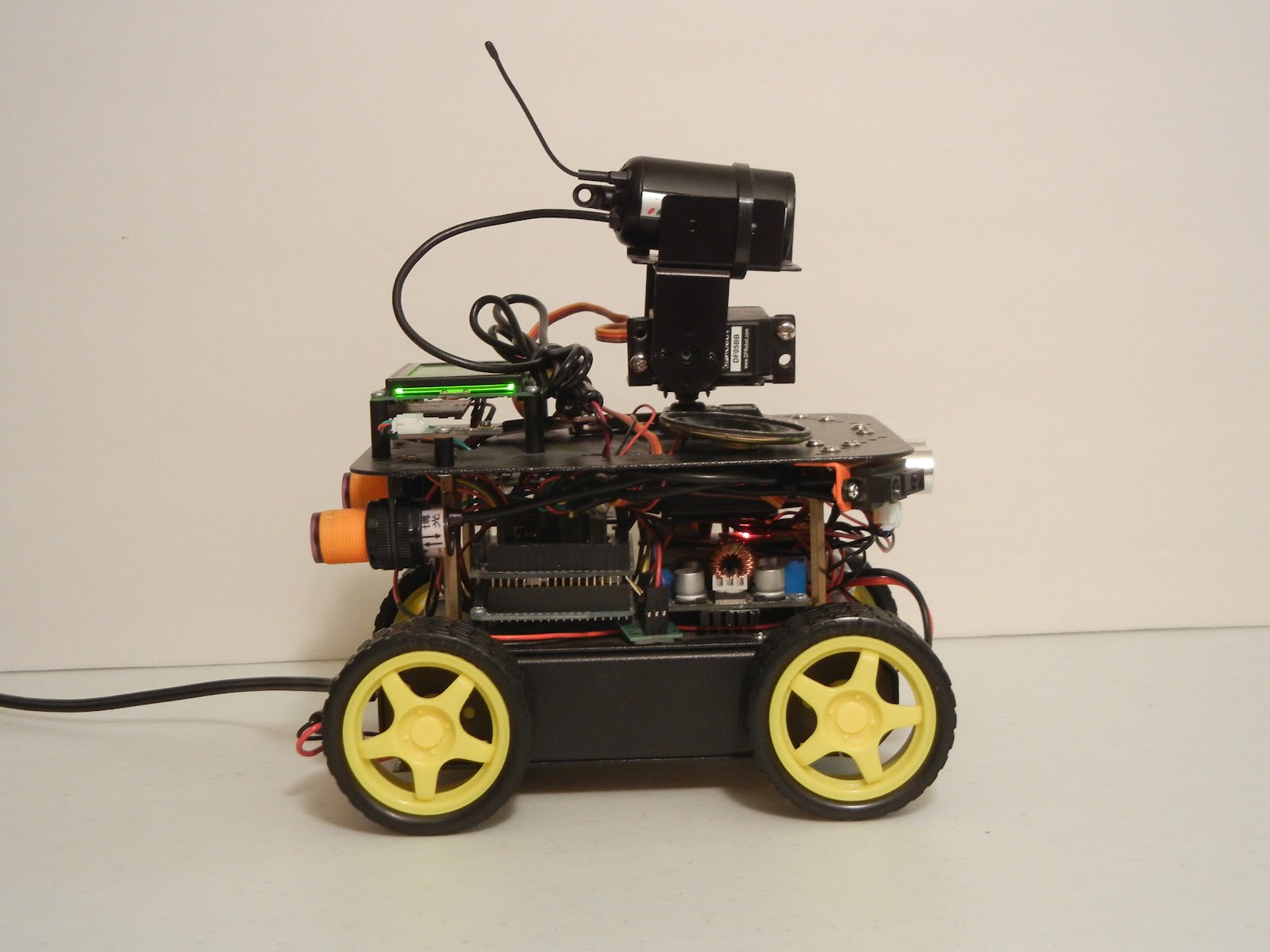
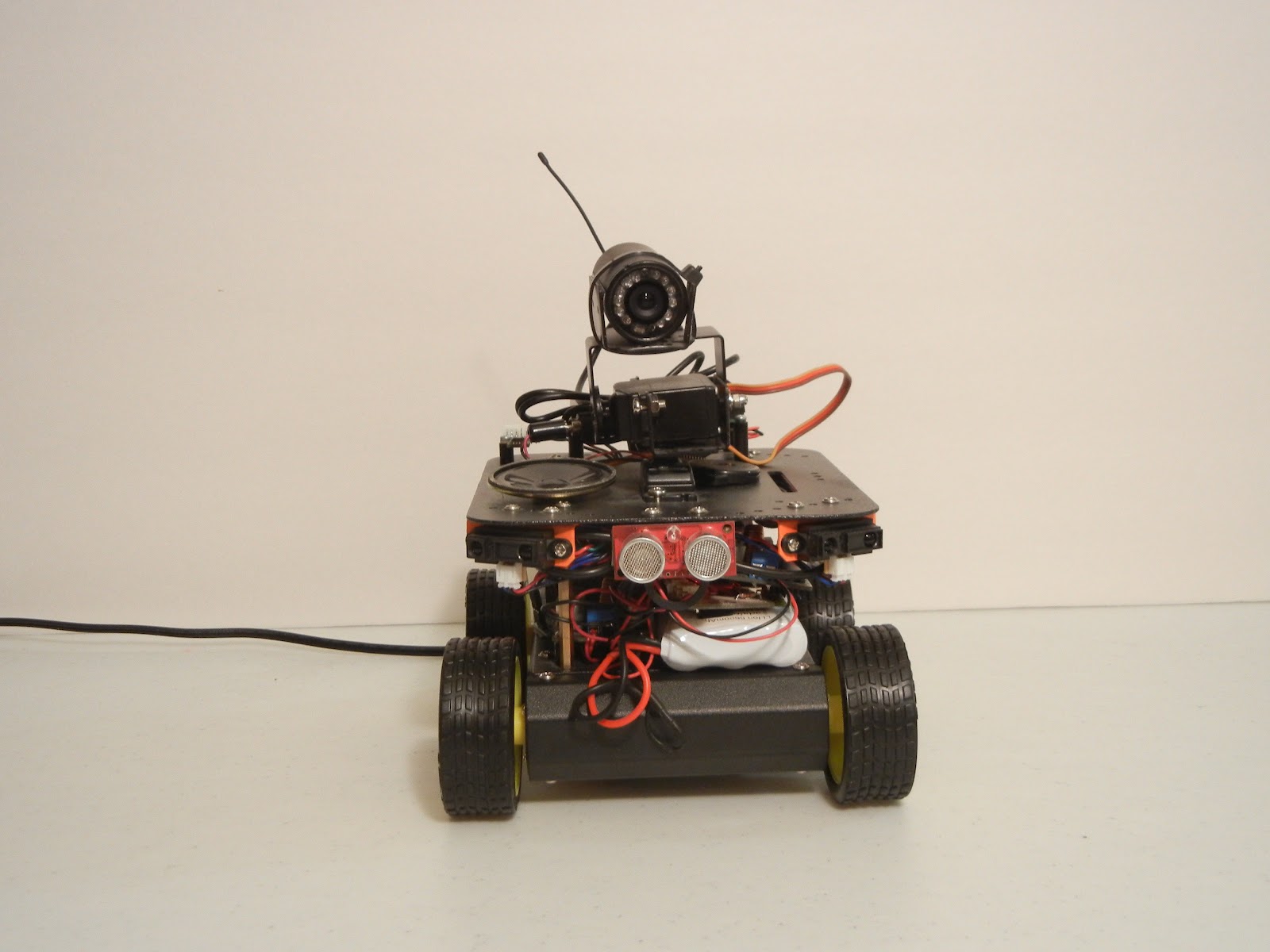
I did try to fix the turning problem by removing the two front motors, which helped a bit. You can see how it turns in the video below. If I hadn’t decided to start over I was going to try a caster in the front but it would of been just another work around.
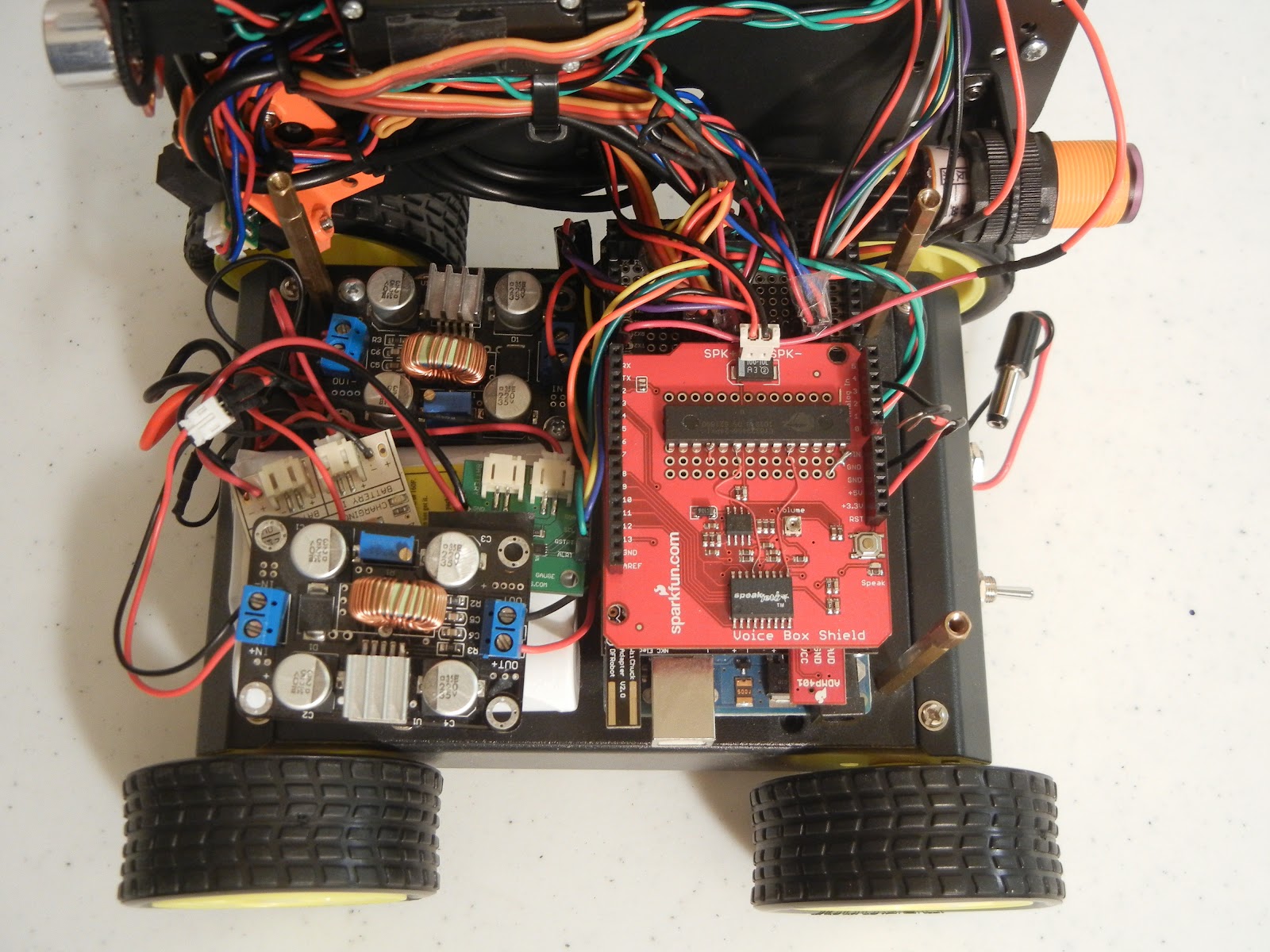
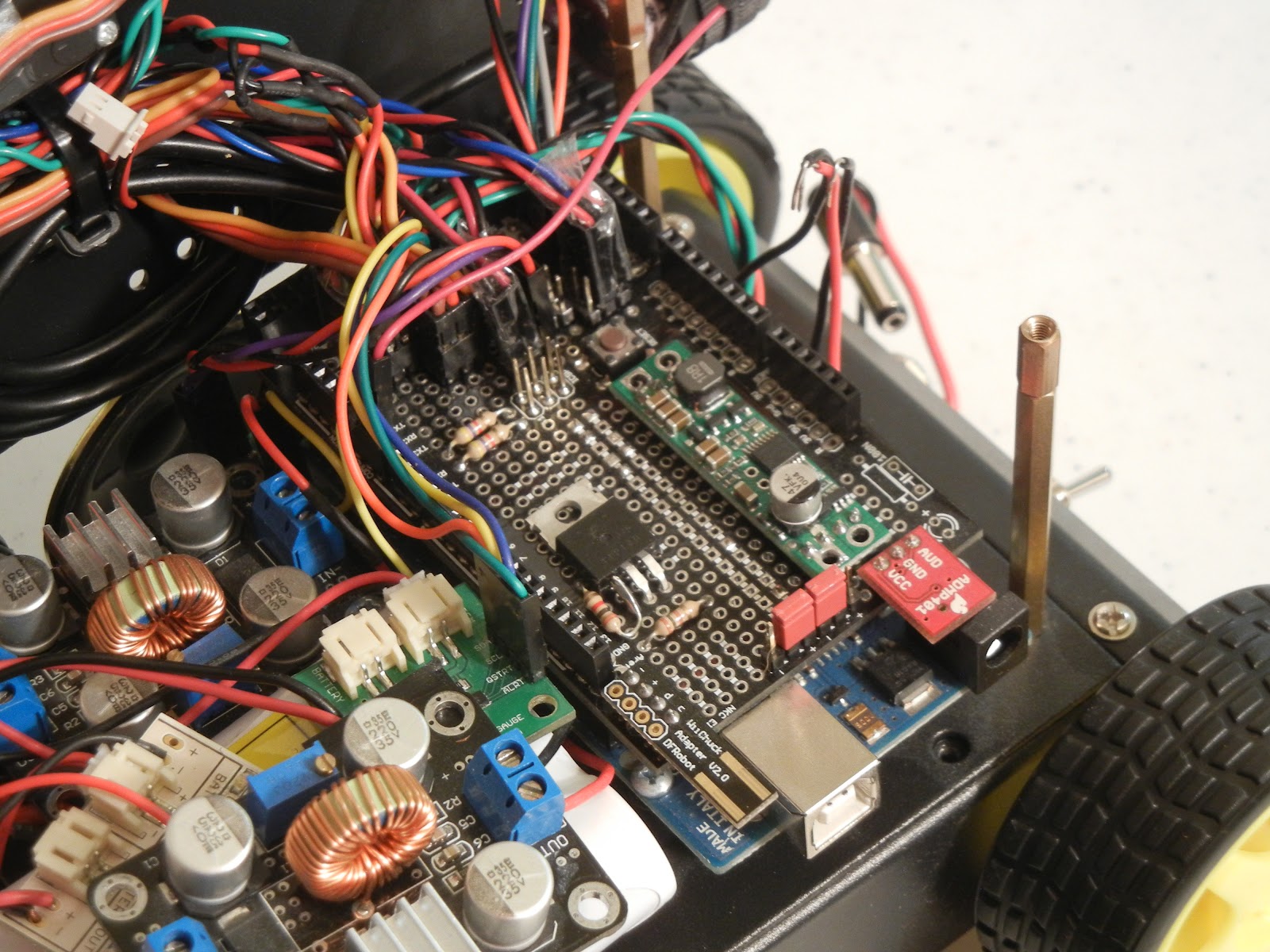
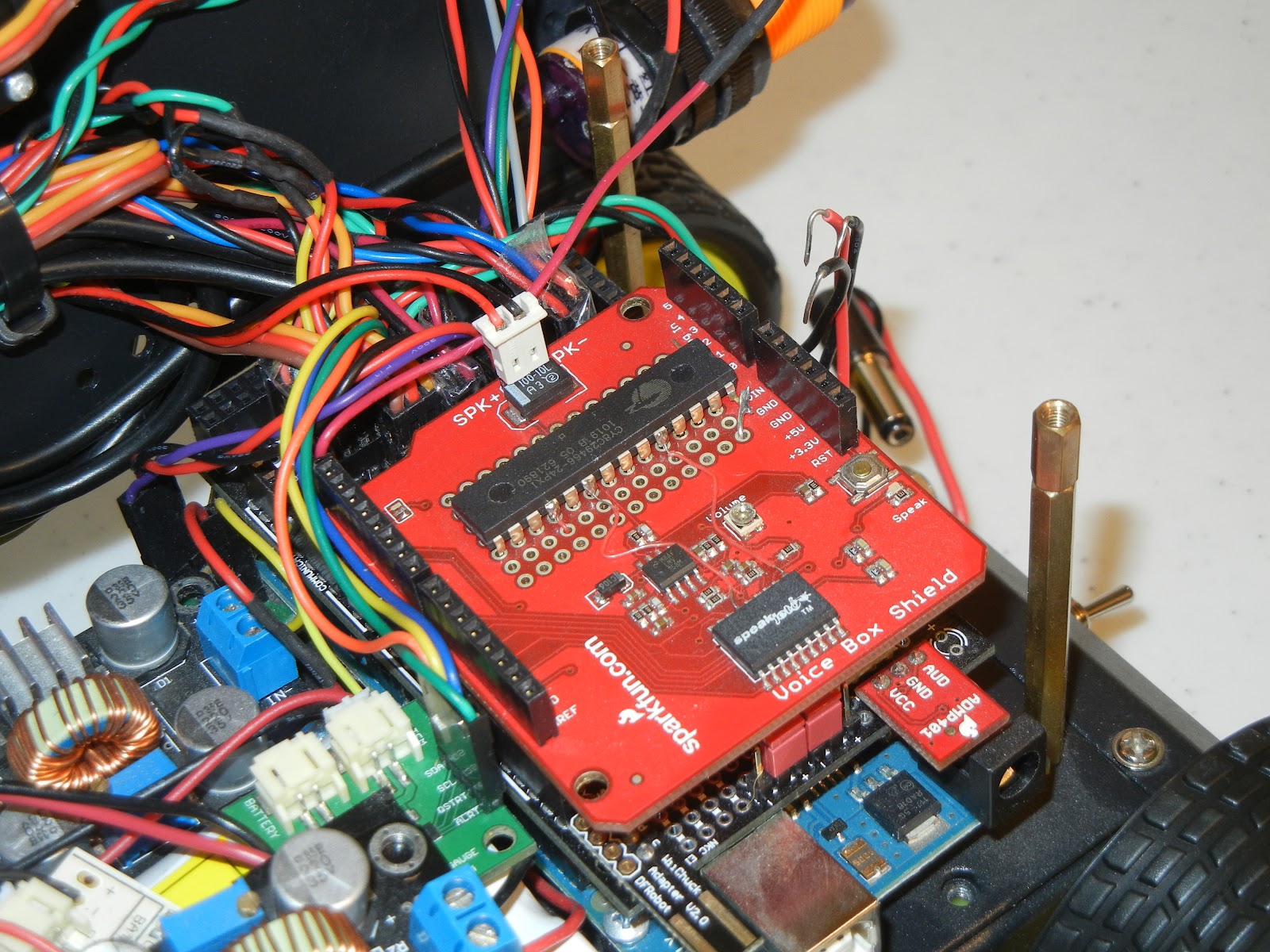
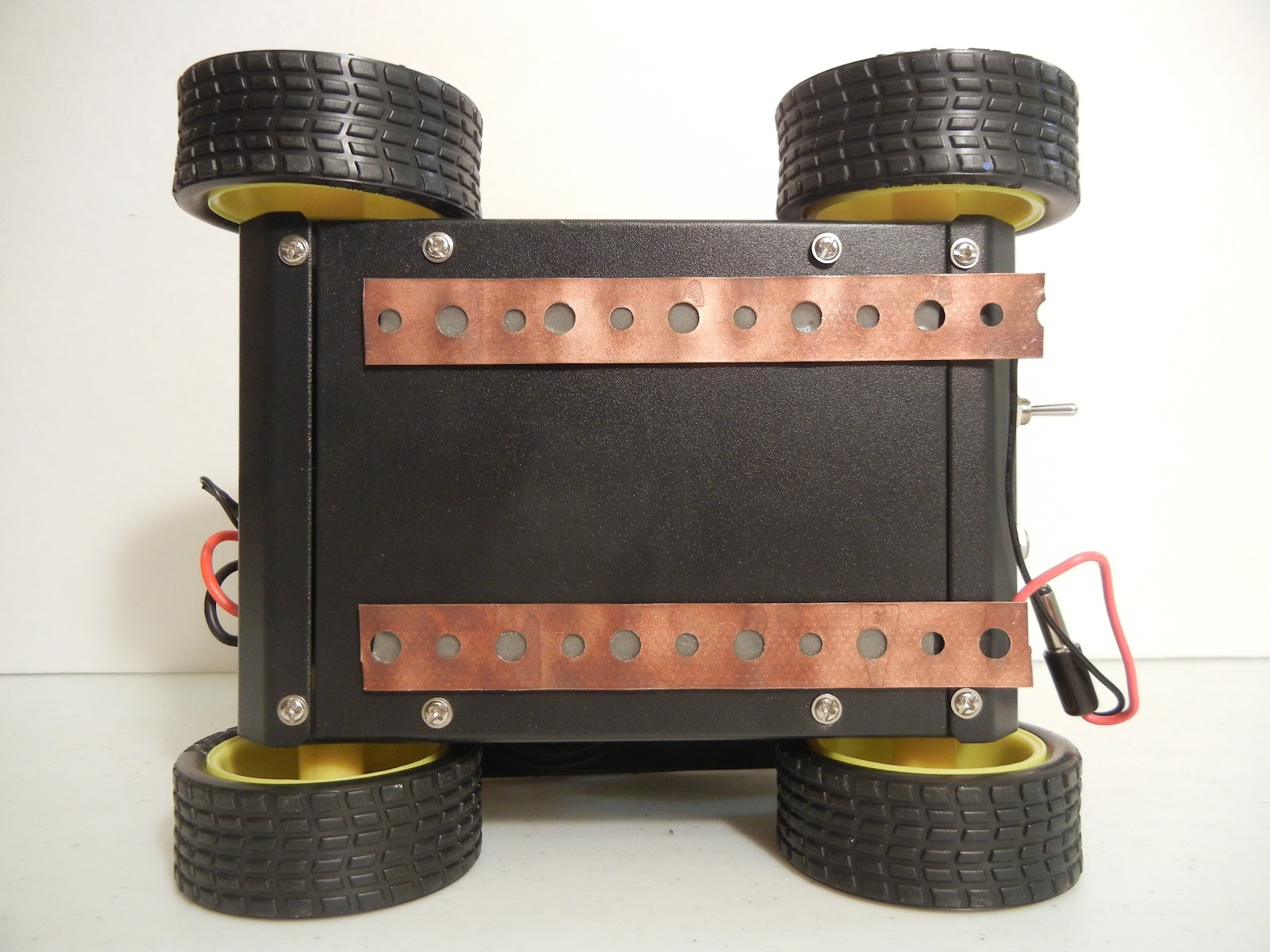
Taking these problems into account and what my goals are for my Security Robot, I can build a much better design. Most of the parts will be reused for version 2 except for where things didn’t work, like the power and motor control systems. These will be redesigned from the ground up.
Here are a few final pictures and video of it’s last run: